



Ī░¤o╚╦╗»Ī▒┌ģä▌Ž┬ė═ÜŌ╣▄Ą└╣▄└Ē║═Į©įOš╣═¹
üĒį┤Ż║ĪČ╣▄Ą└▒ŻūoĪĘ2021─ĻĄ┌4Ų┌ ū„š▀Ż║ÕXĮ©╚A ╔“Į©õh Č┼═■ ĻÉūė│¼ ĢrķgŻ║2021-8-4 ķåūxŻ║
ÕXĮ©╚A ╔“Į©õh Č┼═■ ĻÉūė│¼
ć°╝ę╣▄ŠW╝»łF╚A¢|Ęų╣½╦Š
š¬ę¬Ż║╬ęć°ė═ÜŌ╣▄Ą└Į©įO┼c▀\ĀIęįųąČĒ¢|ŠĆ╠ņ╚╗ÜŌ╣▄Ą└įć³cĒŚ─┐×ķś╦ųŠ▀M╚ļ┴╦ųŪ─▄╗»ļAČ╬ĪŻ═©▀^ĻU╩÷«öŪ░Ī░¤o╚╦╗»Ī▒╣▄└ĒŽÓĻPų¦ō╬╝╝ągĄ─░lš╣ĀŅørŻ¼Ų╩╬÷╣▄Ą└║═šŠł÷įO╩®═Ļš¹ąį╣▄└ĒĄ─ļy³cŻ¼│§▓Į╠Į╦„ė═ÜŌ╣▄ŠĆ¤o╚╦╗»▀\ŠSĄ─ł÷Š░║═ĘĮĘ©Ż¼×ķ¤o╚╦╗»įO╩®Į©įO║═│ŻæB╗»▀\ąą╠ß╣®ģó┐╝ĪŻ
ĻPµIį~Ż║ė═ÜŌ╣▄Ą└Ż╗¤o╚╦╗»Ż╗ųŪ─▄╗»Ż╗ČÓ╝╝ąg╚┌║Ž
ŅAŲ┌ų┴2025─ĻŻ¼ć°ā╚ė═ÜŌ╣▄ŠW┐éęÄ─Żīó▀_ĄĮ24╚f╣½└’ĪŻļSų°╣▄ŠW└’│╠Ą─╝▒╦┘į÷ķLŻ¼×ķīŹ¼F░▓╚½╣▄└Ē║═ųŪ─▄╣▄┐žĄ─═¼▓Į╔²╝ēŻ¼Ī░¤o╚╦╗»Ī▒╝╝ągų▓Į│╔×ķ╣▄Ą└║═šŠł÷╣▄└ĒĄ─æ¬ė├┌ģä▌ĪŻ¤o╚╦╗»ę▓│╔×ķ╚┌║ŽŪą║Žæ¬ė├ł÷Š░ų¦ō╬╝╝ągĪó═Ųäė╔·«aĘĮ╩Į▐Dą═Ą─│ų└m▓╗öÓĄ─Ą³┤·╔²╝ē▀^│╠ĪŻ
1 ¤o╚╦╗»Ą─▒│Š░
1.1 ąąśI▒│Š░
─┐Ū░Ż¼╣▄Ą└┘Y«a═Ļš¹ąį╣▄└ĒųĖś╦╚š┌ģć└┐┴Ż¼Å─▒Ē 1╦∙┴ą┐žųŲųĖś╦┐╔ęŖę╗░▀ĪŻ
▒Ē 1 ╣▄Ą└┘Y«a═Ļš¹ąį╣▄└ĒśIäšųĖś╦
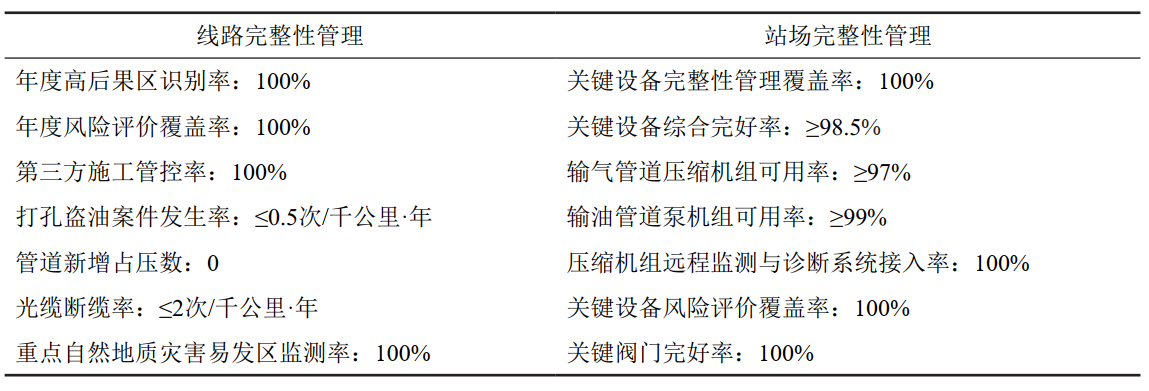
īŹ¼F┘Y«a═Ļš¹ąį╣▄└ĒŻ¼ąĶę¬Ė³Ė▀Ą─č▓ÖzŅl┤╬║═č▓Öz┘|┴┐Ż¼ī”«öŪ░ęį╚╦╣żū„śI×ķų„Ą─č▓ÖzĘĮ╩Į╠ß│÷Š▐┤¾╠¶æĪŻ
1.2 ╝╝ąg▒│Š░
Ž╚▀Mé„Ėą╝╝ągĪó─┐ś╦/ąą×ķūRäe╦ŃĘ©ĪóĖ▀Š½Č╚Č©╬╗╝╝ągĪóöĄūųī\╔·ų¦ō╬Ž┬Ą─Å═ļs┐žųŲ╝╝ągŻ¼┤¾┤¾ĮĄĄ═┴╦¤o╚╦╗»ū„śIĄ─┐šķgŽ▐ųŲ,╠ß╔²┴╦ū„śIŁhŠ│▀mæ¬ąįĪŻ×ķ╣▄Ą└║═šŠł÷¤o╚╦╗»ū„śIäōįņ┴╦╝╝ągŚl╝■ĪŻ─┐Ū░╝╝ągĄ─Ė³ą┬░lš╣ęčĮøį┌æ¬ė├ĻPµI╣سc╚ĪĄ├┴╦ęįŽ┬═╗ŲŲĪŻ
Ż©1Ż®┐┤Ą├ŪÕĪó┐┤Ą├Č«ĪŻŽ╚▀Mé„ĖąŲ„╝╝ąg╠ß╔²┴╦¤o╚╦╗»čbéõĄ─ŁhŠ│Ėąų¬ĘČć·║═Š½Č╚Ż¼─┐ś╦/ąą×ķÖz£y╦ŃĘ©ĪóÖz£y┴┐ūā╗»─Ż╩ĮĘų╬÷╦ŃĘ©Ż¼╩╣ŲõŠ▀éõ┴╦▀mæ¬Ę║╗»ū„śIī”Ž¾║═ļSÖCū„śIŁhŠ│Ą─╝╝ągĪŻ
Ż©2Ż®ąąĄ├£╩ĪŻĖ▀Š½Č╚Č©╬╗╝╝ąg×ķ▀h│╠Š½£╩▓┘┐ž¤o╚╦čbéõ╠ß╣®┴╦╝╝ąg╗∙ĄAŻ¼Č°ī”Üv╩Ę▓┘ū„Ą─Š½£╩ųžÅ═ät┤¾┤¾ĮĄĄ═┴╦▀h│╠▓┘┐žĄ─╚╦╣ż═Č╚ļŻ¼▓ó×ķūįäėĖąų¬▓┘ū„ī”Ž¾Ą─ĀŅæBūā╗»╠ß╣®┴╦▒Ń└¹ĪŻ
Ż©3Ż®ŽļĄ├╚½ĪŻöĄūųī\╔·╩Ūęįū„śIī”Ž¾╝░Ųõ▀\ąą▀^│╠×ķųąą─Ż¼╚┌╚ļęÄ┬╔ĪóęÄätĪó┴„│╠Ż¼ŠC║Ž▀\ė├Ę┬šµĪó┤¾öĄō■Īó╚╦╣żųŪ─▄╝╝ągŻ¼śŗĮ©į┌ą╬æB║═▀\ąąÖCųŲ╔Ž╚½├µ─ŻöMīŹ¾wĄ─öĄūųī\╔·¾wĪŻ
Ż©4Ż®ŠWĮj┼õĪŻ5GęŲäėŠWĮj│¼Ė▀ĦīÆĪó│¼Ą═čėĢrĄ─╠žąį┼c╣żśI┐žųŲī”ŠWĮjĄ─ę¬Ū¾ŽÓŲź┼õŻ¼×ķ¤o╚╦čbéõĄ─ę░═Ōū„śI╠ß╣®┴╦═©ą┼▒ŻšŽĪŻ
1.3 ╔·«aĘĮ╩Į▐Dą═
ęįą┬╝╝ągĪóą┬╩Įä┌äė╣żŠ▀╠µ┤·╚╦╣żū„śIĘĮ╩ĮŽ┬Ą─▓┐Ęų▓┘ū„▀^│╠Ż¼╬³╩š╚╦╣ż▓┘ū„ęÄĘČĪó▓┘ū„Įø“ׯ¼ęį┴„│╠ĪóęÄätą╬╩Į╣╠╗»ė┌¤o╚╦čbéõĄ─æ¬ė├│╠ą“║═öĄō■ÄņųąŻ╗ä┌äėš▀ätė╔¼Fł÷▓┘ū„▐D×ķ▀h│╠▒OęĢ║═┐žųŲĪŻį┌└²ąąąįĪóŁhŠ│Śl╝■ę└┘ćąįĄ═Ą─▓┘ū„ųąŻ¼ėąŚl╝■īŹ¼F¤o╚╦čbéõĄ─ūįų„▀\ąąŻ╗į┌ųŪ─▄▌oų·øQ▓▀╣żŠ▀Ą─ģfų·Ž┬Ż¼▀h│╠╚╦╣ż┐žųŲätĢ■║å╗»×ķįOČ©ū„śI─┐ś╦║═▀xō±¤o╚╦čbéõĘ┤üĄ─Ęųų¦▓┘ū„▀xĒŚĪŻīŹ¼F╔·«aĘĮ╩Įė╔ä┌äė├▄╝»ą═Īó╝╝ąg├▄╝»ą═Ž“øQ▓▀├▄╝»ą═▐DūāŻ©łD 1Ż®ĪŻ
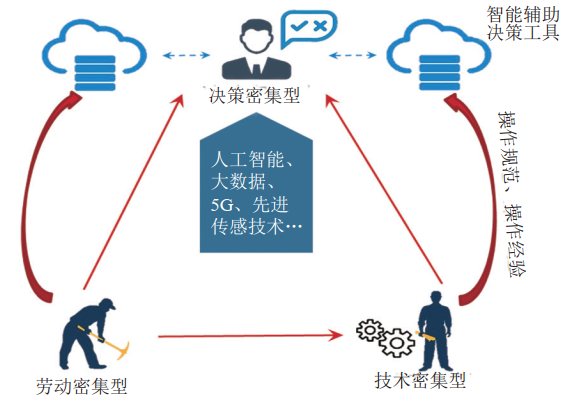
łD 1 ╔·«aĘĮ╩Į▐Dą═ĻPŽĄłD
2 ¤o╚╦╗»╣▄┐žŲĮ┼_Į©įO
2.1 ¤o╚╦╗»╝╝ągæ¬ė├
2.1.1 ╣ż│╠Į©įO
Ż©1Ż® Ąžą╬┐▒▓ņĪŻ¤o╚╦ÖCāAą▒özė░½@Ą├Š½£╩╚²ŠSĄž▒Ē─Żą═Ż¼ė├ė┌įu╣└╣żĄž¼Fł÷╝░ų▄▀ģŪķørĪŻų▄Ų┌ąįĄ─Ąž└Ēą┼Žó▓╔╝»ę▓┐╔ė├ė┌░l¼FŠÅ┬²ĄžųĘūā╗»ī”ęčĮ©│╔╣▄ŠĆĪół÷šŠĄ─Øōį┌═■├{ĪŻŽÓī”ė┌ąląŪ▀bĖą£y└LŻ¼╩╣ė├¤o╚╦ÖC½@Ą├Ąž└Ēą┼ŽóöĄō■Ė³×ķĮøØ·ĪóŠ½╝ÜŪę▓╗╩▄ÜŌŽ¾║═ąląŪ▀\ąą╬╗ų├ė░ĒæĪŻ
Ż©2Ż®╣ż│╠┘|┴┐▀h│╠▒O▓ņĪŻĖ∙ō■į┌Į©╣ż│╠Ą─öĄūųī\╔·¾w/BIM▀x╚ĪĻPūó╬╗ų├╔·│╔¤o╚╦ÖC║ĮŠĆŻ¼Č©³c▓╔╝»╣ż│╠╚²ŠSė░Ž±Ż¼▓ó┼cöĄūųī\╔·¾w/BIMįOėŗ─Żą═▒╚ī”Ż¼įńŲ┌░l¼F║═ĮŌøQ╣ż│╠┘|┴┐å¢Ņ}Ż¼ĮĄĄ══Č«a║¾▀\ŠS│╔▒ŠĪŻ
Ż©3Ż®¤o╚╦╗»╩®╣ż╝╝ągę²╚ļĪŻĮĄĄ═╚╦╣ż╚▒Ž▌ę²╚ļŻ¼į┌╣▄Ą└ųąą─ŠĆī”²RĪóŁh║Ė┐p║ĖĮėĄ╚ĻPµIŁh╣Ø╠ß╔²╩®╣ż┘|┴┐ĪŻ
2.1.2 ŠĆ┬Ę╣▄└Ē
Ż©1Ż®╣▄ŠĆŠų▓┐ģ^Č╬│ŻæB╗»č▓ÖzĪŻ═©▀^¤o╚╦ÖCč▓ŠĆŻ¼ūįų„ūRäe╣▄Ą└═ŌĖ»╬gĪóĄž┘|ūā╗»Īóš╝ē║ĪóŠ»ĮõŠĆā╚╩®╣żĄ╚«É│ŻŪķørŻ¼īŹ¼F¤oąĶ╚╦╣żģó┼cĄ─│ŻæB╗»Ą═│╔▒Šč▓ÖzŻ¼å╬╝▄¤o╚╦ÖCč▓ÖzŅl┤╬┐╔▀_├┐╚šöĄ┤╬ĪŻ¤o╚╦ÖC┐╔╠ß╣®▌d║╔┐žųŲ║═▀h│╠║░įÆ╣”─▄Ż¼▒Ńė┌▀h│╠╚ĪūCĪóšfĘ■Į╠ė²╗“Š»Ėµ“īļxĪŻ
Ż©2Ż®╚½ŠĆĖ▀║¾╣¹ģ^ūRäeĪŻų▄Ų┌ąįķ_š╣200Ī½300├ūĖ▀Č╚ĪóÅVĮŪözė░Ą─ķLŠÓļx¤o╚╦ÖCč▓ÖzŻ¼░l¼FĖ³┤¾ĘČć·Ą─Ąž└Ē/Ąž┘|ūā╗»Ż¼Åøča│ŻæB╗»¤o╚╦ÖCč▓Öz╩▄┐šė“ķ_Ę┼Ė▀Č╚Ż©Ąž├µęį╔Ž120├ūęįā╚Ż®Ž▐ųŲĄ─č▓ÖzŠųŽ▐Ż¼ā╔š▀╗ź×ķča│õą╬│╔č▓ÖzĪ░Š½Ī▒┼cĪ░Ę║Ī▒ĪóĪ░šŁĪ▒┼cĪ░īÆĪ▒ĪóĪ░Ė▀ŅlĪ▒┼cĪ░Ą═ŅlĪ▒Ż¼ęį╚½├µ╝░ĢrūRäeĖ▀║¾╣¹ģ^ūā╗»ŪķørĪŻ
2.1.3 ł÷šŠ╣▄└Ē
Ż©1Ż®šŠł÷╝░ķy╩ęįOéõ▀h│╠▒OęĢ╝░┐žųŲĪŻ╗∙ė┌╬’┬ōŠW╝╝ągĄ─▀h│╠▓┘┐žī”šŠł÷ķy╩ęįOéõ▀Mąą▀h│╠▓┘┐ž║═▀Bµi═Č═╦ĪŻ╗∙ė┌ųŪ─▄ūRäeĘų╬÷Ą─ęĢŅl╝╝ągį┌šŠł÷ķy╩ęģ^ė“īŹ¼F▀ģĮńŠ»ĮõĪóęĢŅl│Ł▒ĒĪó╚ļŪųł¾Š»Īóū„śIūRäeĄ╚╣”─▄ĪŻ
Ż©2Ż®šŠł÷╗“ķy╩ę═Ōć·ŁhŠ│╝░įO╩®═Ļš¹ąįÖz▓ķĪŻ±všŠą²ęĒ¤o╚╦ÖC╗“Įø▀^šŠł÷Ą─╣▄ŠĆč▓Özą²ęĒ¤o╚╦ÖC└@’wšŠł÷╗“ķy╩ęĮ©ų■š¹¾węį╝░ųžę¬įO╩®Ż¼Öz▓ķĮ©ų■═ŌĮYśŗ╚▒Ž▌ĪóįO╩®╚▒Ž▌Ż¼ų▄▀ģŁhŠ│═■├{ĪŻ
2.1.4 æ¬╝▒╠Äų├
Ż©1Ż®╩┬╣╩įńŲ┌╠Äų├ĪŻĖąų¬╩┬╣╩░l╔·ĢrŻ¼┐╔▀h│╠▓┘┐žĖĮĮ³±všŠ¤o╚╦ÖC┌s═∙¼Fł÷▀MąąŠ»╩ŠĪó╩Ķ╔ó╚║▒ŖĄ╚įńŲ┌╣żū„ĪŻ
Ż©2Ż®¼Fł÷æBä▌ą┼Žó▓╔╝»║═š╣╩ŠĪŻį┌╩┬╣╩╠Äų├▀^│╠ųąŻ¼┐╔└¹ė├ČÓ¤o╚╦ÖC╚½ĘĮ╬╗½@╚Ī¼Fł÷«ŗ├µŻ¼Ä═ų·æ¬╝▒ųĖō]ųąą─┴╦ĮŌ¼Fł÷æBä▌ĪŻ
Ż©3Ż®éõŲĘéõ╝■╝▒╦═ĪŻ
2.2 ¤o╚╦ū„śI╣▄└ĒŲĮ┼_Į©įO
2.2.1 öĄō■═©ėŹ
æ¬ė├│¼Ą═čėĢrĄ─5GęŲäėŠWĮj┤ŅĮ©Å─¤o╚╦čbéõĄĮ┐žųŲŽĄĮy║¾┼_į┘ĄĮ▀h│╠▓┘┐žĄ─╚²³cā╔╠°öĄō■µ£┬ĘĪŻę└ō■īŹ£yŪķørŻ¼┐žųŲ║═▀b£yöĄō■Č╦ĄĮČ╦é„▌öĢrčė┐╔Ą═ų┴50 msŻ¼1080 PĖ▀ŪÕęĢŅlČ╦ĄĮČ╦é„▌öĢrčė┐╔Ą═ų┴300 msŻ¼┼c³cĄĮ³cęĢŠÓ═©ą┼µ£┬Ęąį─▄ĮėĮ³ĪŻ
2.2.2 ¤o╚╦ū„śI╣▄└ĒŲĮ┼_
łD 2╩Ū─│¤o╚╦ū„śI╣▄└ĒŲĮ┼_ģó┐╝┐“╝▄ĪŻ
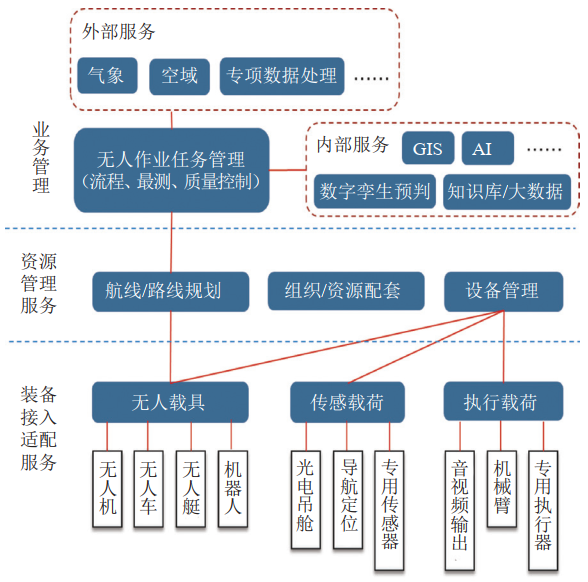
łD 2 ¤o╚╦ū„śI╣▄└ĒŲĮ┼_ģó┐╝┐“╝▄
Ż©1Ż®čbéõĮė╚ļīėĪŻĮŌøQ▓╗═¼ŅÉą═¤o╚╦čbéõĄ─Įė╚ļå¢Ņ}ĪŻ×ķ║å╗»▀m┼õęÄätŻ¼īó¤o╚╦čbéõĪó┐╔╠µōQ╚╬äš▌d║╔Īó¬Ü┴óé„ĖąŲ„ę└ō■╣”─▄ĘųĮŌ×ķĪ░▌dŠ▀Ī▒ Ī░é„Ėą▌d║╔Ī▒Ī░ł╠ąą▌d║╔Ī▒╚²ŅÉŻ¼Č°čbéõĄ─īŹļH╬’└Ēą╬æBät═©▀^įOéõ╣▄└Ēīė▀Mąąš¹║ŽĪŻ¤o╚╦čbéõĄ─Įė┐┌║═┐žųŲģfūhś╦£╩╗»│╠Č╚įĮĖ▀Ż¼čbéõĮė╚ļ▀m┼õĄ─ļyČ╚įĮĄ═Ż¼▀\ąą┐žųŲĄ─ę╗ų┬ąįįĮ║├Ż╗į┌æ¬ė├Śl╝■│╔╩ņĢrŻ¼┐╔┐╝æ]═ŲäėŽÓĻPęÄĘČĪóś╦£╩Ą─ųŲČ©ĪŻ
Ż©2Ż®┘Yį┤╣▄└ĒīėĪŻ×ķ¤o╚╦ū„śI╚╬䚥─▀\ąą╠ß╣®┘Yį┤▒ŻšŽĪŻ┘Yį┤ŅÉą═░³└©¤o╚╦čbéõĪóģó┼c¤o╚╦ū„śIĄ─╚╦åTĪó¤o╚╦ū„śI╦∙ąĶĄ──▄į┤/║─▓─Ż¼ęį╝░Į╗═©║═ū„śI┐šķgĪŻ
Ż©3Ż®śIäš╣▄└ĒīėĪŻīŹ¼Fī”ū„śI▀^│╠Ą─╣▄┐žęį╝░╠ß╣®Ė„ŅÉöĄō■Ę■äšĪŻū„śI╚╬äš╣▄└Ē╩Ū║╦ą─Ż¼╝»│╔┴╦▓╗═¼¤o╚╦ū„śI▀^│╠Ą─┴„│╠┐žųŲĪó▓┘ū„ł╠ąąęÄätĪóŠų▓┐║═╚½ŠųĄ─┘|┴┐ś╦£╩║═«É│ŻĀŅæB▀ģĮńŚl╝■Ą╚ĪŻć·└@ū„śI╚╬äš╣▄└ĒŻ¼ąĶę¬GIS(Ąž└Ēą┼ŽóŽĄĮy)Īó╚╦╣żųŪ─▄Ęų╬÷ĪóöĄūųī\╔·ŅA┼ąĪóīŻśIų¬ūRÄņ/┤¾öĄō■Ęų╬÷Ą╚ā╚▓┐Ę■äš╠ß╣®▌oų·öĄō■ų¦ō╬ĪŻśIäš╣▄└Ēīė權▀éõķ_Ę┼ąįŻ¼ė├ė┌Įė╚ļŲĮ┼_╔ą╬┤╝»│╔Ą─öĄō■Ę■äš╗“╔ńĢ■╣½╣▓öĄō■Ę■䚯©╚ńÜŌŽ¾Īó┐šė“ą┼ŽóŻ®ĪŻ
2.2.3 öĄō■▓┘┐ž
▓┘┐žĮKČ╦/Į╗╗źĮKČ╦Ą─▒ŃĮ▌ąį╩Ū¤o╚╦ū„śIŲĮ┼_öĄō■Ę■äš─▄┴”Ą─═Ō╗»Ż¼ę└ū„śIčbéõŅÉą═Īóģó┼c╚╦åTĮŪ╔½Č°▓╗═¼ĪŻū„×ķģó┐╝Ż¼▀@└’│ķŽ¾│÷3éĆ╣▓ąįł÷Š░ĪŻ
Ż©1Ż®▒ŃĮ▌Ą─öĄō■ĘųŽĒ┼c▀h│╠ģfū„ĪŻ▀h│╠▓┘ū„╚╦åT┐╔īó¤o╚╦čbéõĄ─▀\ąąĀŅæBöĄō■║═īŹĢr«ŗ├µ═©▀^īŻė├APPĪó╬óą┼Ą╚═©ė├╔ńĮ╗╣żŠ▀▒ŃĮ▌ĄžĘų░lĄĮŲõ╦¹▀h│╠╚╦åTĄ─ėŗ╦ŃÖCĪó╩ųÖCĄ╚═©ė├ĮKČ╦Ż¼ļSĢrļSĄž½@Ą├īŻ╝ęųĖī¦║═▀h│╠ģfų·ĪŻ
Ż©2Ż®ĮŪ╔½éõĘ▌║═ņ`╗ŅŪąōQĪŻ▀h│╠▓┘ū„╚╦åT┐╔īó¤o╚╦čbéõĄ─▓┘ū„ÖÓŽ▐▐DęŲĮo┴Ēę╗▓┘ū„╚╦åTŻ¼īŹ¼F¤o╚╦ū„śI╚╬䚥─ł╠ąą┘|┴┐Īó┐ńīŻśIŅIė“║═┐ńĄžė“Ą──▄┴”╠ß╔²ĪŻ
Ż©3Ż®öĄō■ģR╝»┼cŠC║ŽĘų╬÷Īó│╩¼FĪŻīóČÓ├¹▀h│╠▓┘ū„╚╦åT╝░¤o╚╦čbéõśŗ│╔Ą─ū„śI╝»╚║Ą─ČÓ┬ĘīŹĢröĄō■/«ŗ├µį┌ųĖ┐žųąą─ģR╝»ĪóĘų╬÷║═ŠC║Ž│╩¼FĪŻ×ķÅ═ļs╣ż│╠ū„śIĪóæ¬╝▒ųĖō]╠ß╣®╚½├µĪó╝┤ĢrĮ╗╗źĄ─╝╝ągų¦ō╬ĪŻ
3 ¤o╚╦ū„śIŲĮ┼_░Ė└²
║Ż╔Ž5G¤o╚╦Ń@Š«ŲĮ┼_Į©įOŻ©łD 3Ż®Ż¼ų╝į┌ĮŌøQ║Ż╔ŽŲĮ┼_įO╩®/įOéõĄ─═Ļ╚½▀BĮėŻ¼▓óį÷ÅŖ▒OęĢą┼ŽóĄ─▓╔╝»║═▀ģŠēųŪ─▄Ęų╬÷Ż¼į┌ėąŽ▐Ą─ąląŪ═©ėŹÄ¦īÆ┘Yį┤Ž┬Ż¼▀h│╠½@Ą├╚½├µ£╩┤_Ą─ŲĮ┼_▀\ąąĀŅørŻ¼Å─Č°£p╔┘¤o╚╦ÖC║═īŻśI╝╝ąg╚╦åTĄ─│÷äėŅl┤╬ĪŻ
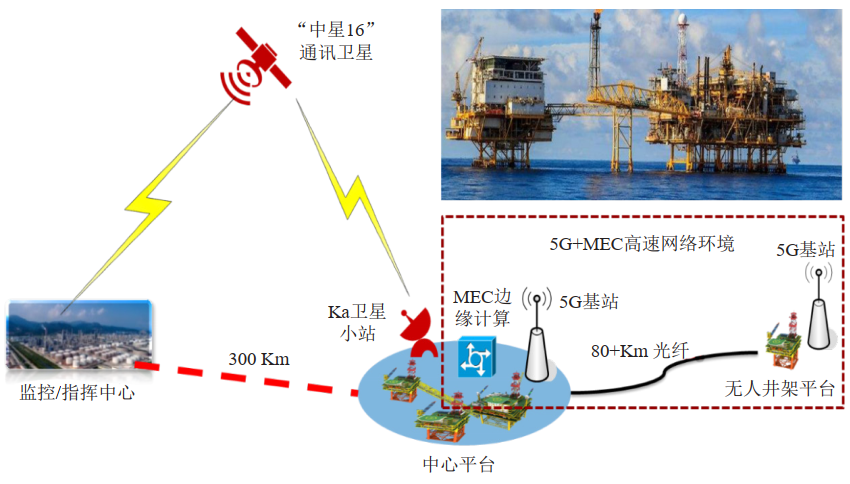
łD 3 ║Ż╔Ž5G¤o╚╦Ń@Š«ŲĮ┼_śIäš▀ē▌ŗłD
įć³cģ^ė“ė╔ĻæĄž▒O┐žųĖō]ųąą─Īó║Ż╔Žųąą─Ń@Š«ŲĮ┼_║═¤o╚╦Š«╝▄ŲĮ┼_ĮM│╔ĪŻį┌ųąą─ŲĮ┼_┤ŅĮ©5G¤oŠĆŠųė“ŠWŻ¼▓ó═©▀^║ŻĄū╣Ō└|┼c80╣½└’═ŌĄ─¤o╚╦Š«╝▄╔ŽĄ─5G¤oŠĆŠųė“ŠW┬ō═©ĪŻŃ@Š«ŲĮ┼_įO╩®/įOéõĄ─▒O┐žöĄō■ģRŠ█ė┌ųąą─ŲĮ┼_MEC▀ģŠēėŗ╦Ń╣سcŻ¼Įø▀^ą┼Žó╠ß╚Ī║═ųŪ─▄į\öÓŻ¼│ķŽ¾│÷īŹĢr▀\ąąĀŅæBł¾ĖµŻ¼═©▀^ąląŪµ£┬Ę╔Žé„ĮoĻæĄž▒O┐žųĖō]ųąą─ĪŻ▒O┐žųĖō]ųąą─ą┼Žóę▓┐╔═©▀^┤╦═©ą┼ŠWĮjī”║Ż╔ŽŲĮ┼_įO╩®/įOéõīŹ╩®▀h│╠┐žųŲĪŻ
░Ė└²ųąŻ¼═©▀^ąląŪųą└^5GöĄō■┬ō═©ŠWĮj╣┬ŹuŻ¼ī”┤®įĮ¤o╚╦ģ^╗“╣½ė├4G/5GŠWĮjĖ▓╔w▓╗ūŃĄžģ^Ą─šŠł÷īŹ¼F¤o╚╦ųĄ╩žŠ▀ėąĮĶĶbęŌ┴xĪŻ
4 ╬┤üĒš╣═¹
4.1 ¤o╚╦╗»Ą─Ą³┤·č▌▀MŅAŲ┌
Ż©1Ż®Ą┌ę╗ļAČ╬Ż║¤o╚╦čbéõęūė├╗»ĪŻąąśIī”¤o╚╦čbéõĄ─╩╣ė├ęįĘĮ░Ė“×ūC║═ąĪęÄ─Żįć³c×ķų„Ż¼ūįų„╗»║═╣”─▄╝»│╔Č╚╔ą▓╗Ė▀Ż¼ū„śI¼Fł÷▓╗─▄├ōļx╚╦╣żĖ╔ŅAĪŻ▀@ę╗ļAČ╬Ą─Į©įOųž³cŻ¼╩ŪÅ─Ė─╔Ųęūė├ąį│÷░lŻ¼öU┤¾¤o╚╦čbéõĄ─╩╣ė├┴┐║═╚╦╣ż╠µ┤·┬╩Ż¼×ķ¤o╚╦čbéõĄ─ęÄ─Żæ¬ė├äōįņ╗∙ĄAąį╝╝ągŚl╝■ĪŻ
Ż©2Ż®Ą┌Č■ļAČ╬Ż║¤o╚╦čbéõ¾wŽĄ╗»ĪŻļSų°¤o╚╦čbéõĄ─┤¾┴┐æ¬ė├Ż¼¼Fł÷ū„śIųą▒╚ųžūŅ┤¾Ą─▓┘ū„ęčė╔¤o╚╦čbéõ│ąō·Ż¼Ą½╩ŻėÓĄ─¼Fł÷▓┘ū„ģs║Ł╔wĖ³ČÓŅÉą═ĪŻ▀@ę╗ļAČ╬Ą─Į©įOųž³cŻ¼╩Ū═©▀^žSĖ╗¤o╚╦čbéõĄ─ŅÉą═Īó╣”─▄ęį╝░ā×╗»¤o╚╦čbéõķgĄ─ū„śI┼õ║ŽŻ¼ęįīŹ¼F═Ļ╚½ęŌ┴x╔ŽĄ─ū„śI¼Fł÷¤o╚╦╗»Ż¼╚╦╣żāHį┌║¾┼_▒OęĢ║═▀h│╠▓┘┐žĪŻ═Ļ╚½Ż©╗“ĮėĮ³═Ļ╚½Ż®Ą─¤o╚╦╗»Ż¼Ę┼īÆ┴╦ū„śI░▓╚½ę¬Ū¾Ż¼×ķū„śI╣ż╦ćĄ─╠ß╔²ķ_Ę┼┴╦Ė³┤¾┐šķgĪŻ
Ż©3Ż®Ą┌╚²ļAČ╬Ż║¤o╚╦čbéõūįų„╗»ĪŻ¤o╚╦čbéõĪó│ŻęÄįOéõ─╦ų┴╔·«aŁhŠ│Ą─öĄūųī\╔·¾węčŲš▒ķĮ©│╔▓ó┌ģė┌│╔╩ņŻ©Ž╚ų¬Ų┌Ż®ĪŻį┌öĄūųī\╔·¾wī”¼FīŹ╩└ĮńĄ─Ę┬šµŅA┼ąųĖī¦Ž┬Ż¼¤o╚╦čbéõŠ▀éõ▌^Ė▀Ą─ūįų„▀\ąą─▄┴”Ż¼ČÓöĄŪķørŽ┬Ż¼╚╦╣żāHģó┼cĘĮ░ĖųŲČ©║═øQ▓▀ĪŻ
4.2 š╣═¹
Å─īŹ¼F¤o╚╦ųĄ╩žŻ¼ĄĮęÄ─Ż╗»æ¬ė├īŹ¼FĪ░╔┘╚╦╗»Ī▒Ż¼į┘ĄĮ═Ļ╔Ų¤o╚╦čbéõ¾wŽĄīŹ¼Fū„śI¼Fł÷¤o╚╦╗»Ż¼▀ĆĒÜĮøÜvę╗éĆ│ų└mĄ─├■╦„║═Ą³┤·▀^│╠ĪŻ
Ż©1Ż®ĮĶų·ųŪ─▄╗»╣żŠ▀¶█║Ž│ą▌d┴„│╠/ęÄĘČĪó¼Fł÷ū„śIĮø“×Īó╔·«a╣▄└ĒĮø“ׯ¼ąĶę¬Ė„ģó┼cĘĮĘeśOģfū„Ż¼░lō]╚║¾wųŪ╗█Ż¼═┌Š“ąĶŪ¾┼cå¢Ņ}Ż¼čąŠ┐ĮŌøQ╦╝┬ĘŻ¼═Ų▀MĘĮ░ĖįOėŗĪó“×ūC║═ā×╗»ĪŻ
Ż©2Ż®į┌ęŲäėŠWĮj═©ą┼ĪóöĄō■╣▄└ĒĪó¤o╚╦čbéõ▀h│╠▓┘┐žĪó╣▄Ą└öĄūųī\╔·¾w│╔╩ņČ╚┼Óė²Ą╚ĻPµI╝╝ągŅIė“╚ĪĄ├═╗ŲŲŻ╗Ė·█ÖŽÓĻP╝╝ągĄ─ūŅą┬│╔╣¹Ż¼ūRäeæ¬ė├ārųĄ║═ĘeśO“×ūCŻ¼ęį╝░ĮĶĶbŲõ╦¹ąąśIŽ╚▀MĮø“×ĪŻ
Ż©3Ż®į┌╝╝ąg“×ūC│╔╣¹Ęe└█ĄĮę╗Č©│╠Č╚║¾Ż¼ėą▒žę¬ųŲČ©Ę¹║Žė═ÜŌ╣▄Ą└ąąśIæ¬ė├ąĶꬥ─╝╝ągęÄĘČŻ¼Ā┐ę²¤o╚╦čbéõĪó╝╝ąg╣®æ¬╔╠Ą─╝╝ągĖ─▀MĘĮŽ“Ż¼Å─Č°▀_ĄĮ▒ŻšŽæ¬ė├ą¦╣¹ĪóĮĄĄ═ęÄ─Żæ¬ė├│╔▒ŠĄ──┐Ą─ĪŻ

ū„š▀║åĮķŻ║ÕXĮ©╚AŻ¼š²Ė▀╝ē╣ż│╠ĤŻ¼▓®╩┐蹊┐╔·Ż¼¼F╚╬ć°╝ę╣▄ŠW╝»łF╚A¢|Ęų╣½╦ŠĖ▒┐éĮø└ĒŻ¼Ž╚║¾į┌ųąć°╩»ė═╚A¢|▌öė═╣▄└ĒŠųĪóųąć°╩»╗»╝»łF╣▄Ą└ā”▀\╣½╦ŠĪóųąć°╩»╗»╣╔Ę▌╣½╦Š╣▄Ą└ā”▀\Ęų╣½╦ŠĪóųąć°╩»╗»õN╩█╚A▒▒Ęų╣½╦ŠĪóųąć°╩»╗»õN╩█╚A¢|Ęų╣½╦ŠĄ╚å╬╬╗╣żū„ĪŻį°½@ć°╝ę┐Ų╝╝▀M▓Į¬äČ■Ą╚¬äę╗ĒŚĪóųąć°╩»ė═Īóųąć°╩»╗»┐Ų╝╝▀M▓Įę╗Ą╚¬äĪóČ■Ą╚¬ä║═╚²Ą╚¬äČÓĒŚĪŻ┬ōŽĄĘĮ╩ĮŻ║13685199166Ż¼qjh4077@163.comĪŻ
╔ŽŲ¬Ż║
Ž┬Ų¬Ż║
 Ė╩╣½ŠW░▓éõ 62010202003034╠¢
Ė╩╣½ŠW░▓éõ 62010202003034╠¢ 
