



£y┐žū▀└╚į┌╔ĮĄž╣▄Ą└¤o╚╦ÖCč▓ÖzųąĄ─æ¬ė├
üĒį┤Ż║ĪČ╣▄Ą└▒ŻūoĪĘļsųŠ ū„š▀Ż║±R╬─ ĢrķgŻ║2021-1-21 ķåūxŻ║
±R╬─
ųąć°ļŖūė┐Ų╝╝╝»łF╣½╦ŠĄ┌╬Õ╩«╦─蹊┐╦∙
š¬ ꬯║é„ĮyĄ─ė═ÜŌ╣▄Ą└č▓Öz▓╔ė├╚╦╣żĘĮ╩ĮŻ¼╩▄ųŲė┌╔Įģ^Ąžą╬ĪóÜŌ║“ė░ĒæŻ¼┤µį┌╚╦┴”│╔▒ŠĖ▀Īóä┌äėÅŖČ╚┤¾Īóą¦┬╩Ą═Ą╚å¢Ņ}ĪŻįOėŗ┴╦ę╗ĘN╗∙ė┌£y┐žū▀└╚Ą─ė═ÜŌ╣▄Ą└¤o╚╦ÖCč▓ÖzŽĄĮyŻ¼ķ_š╣┴╦¤o╚╦ÖCæ¬ė├ė┌╔Įģ^Ą╚Å═ļsĄžą╬Ąž├▓▀Mąą▀hŠÓļx┤¾ĘČć·č▓Özū„śIĄ─ĻPµI╝╝ąg蹊┐ĪŻŽĄĮyæ¬ė├ė┌┘Fų▌Ūń┬Ī╠ņ╚╗ÜŌ╣▄Ą└č▓Özū„śIŻ¼▒Ē├„┐╔ęįØMūŃ╣▄Ą└č▓Öz╣żū„ąĶę¬ĪŻ
ĻPµIį~Ż║ė═ÜŌ╣▄Ą└Ż╗╔Įģ^Ż╗£y┐žū▀└╚Ż╗č▓ÖzŽĄĮyŻ╗¤o╚╦ÖC
╔Įģ^╣▄Ą└╦∙╠Äģ^ė“┤¾ČÓ╔ĮĖ▀┴ų├▄Īó╚╦█E║▒ų┴ĪóĮ╗═©▓╗▒ŃŻ¼é„Įyč▓ÖzĘĮĘ©╣żū„┴┐┤¾Īóč▓Özą¦┬╩Ą═Ż¼╠žäeį┌Ė▀║Ż░╬┤¾┬õ▓Ņ║═┐ńįĮ┤¾ĮŁ┤¾║ėĄ╚╣▄Č╬Ż¼ęį╝░░l╔·▒∙×─Īó╦«×─ĪóĄžšĪó╗¼Ų┬Ģr║═ę╣═Ēķ_š╣č▓▓ķŻ¼║▄ļyū÷ĄĮīŹĢrąįĪóėąą¦ąį║═╚½Ė▓╔wĪŻ
Į³─ĻüĒŻ¼ė╔ė┌¤o╚╦ÖCŠ▀éõĮøØ·ąįĪó░▓╚½ąįĪóęū▓┘ū„ĪóĘ┤æ¬┐ņĪóū„śIĘČć·ÅVĄ╚╠ž³cŻ¼╗∙ė┌įŲöĄō■ĪóęĢŅlłDŽ±ūRäeĄ╚ą┬╝╝ągĄ─ųŪ─▄¤o╚╦ÖCįĮüĒįĮÅVĘ║Ąžæ¬ė├ė┌ė═ÜŌ╣▄Ą└č▓Öz╣żū„[1-3]Ż¼Ą½┤µį┌▀hŠÓļxū„śI─▄┴”ŪĘ╚▒Ż¼öĄō■═Ļš¹ąį║═īŹĢrąį▓╗ūŃŻ¼ęį╝░öĄō■é„▌ö░▓╚½ąįå¢Ņ}ĪŻ
╣Pš▀įOėŗ┴╦╗∙ė┌£y┐žū▀└╚Ą─¤o╚╦ÖCė═ÜŌ╣▄Ą└č▓ÖzŽĄĮyŻ¼═©▀^£y┐žū▀└╚īó¤o╚╦ÖC▓╔╝»Ą─īŹĢröĄō■║═▒O£y«ŗ├µ╗žé„ĮoĄž├µöĄō■╠Ä└ĒŲĮ┼_Ż¼Įøæ¬ė├ė┌┘Fų▌Ūń┬Ī╠ņ╚╗ÜŌ╣▄Ą└č▓Özū„śIŻ¼┐╔ęįØMūѤo╚╦ÖCč▓Öz▀hŠÓļxĪó┤¾ĘČć·ĪóīŹĢrąįĪó░▓╚½ąįĪó═Ļš¹ąįĄ─ę¬Ū¾ĪŻ
1 ŽĄĮy┐é¾wįOėŗĘĮ░Ė
1.1 ŽĄĮy╝▄śŗ
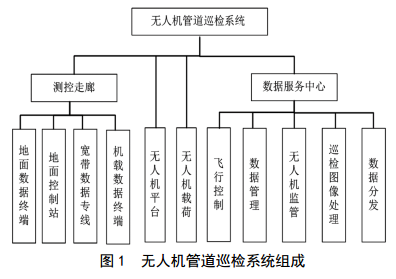
╗∙ė┌£y┐žū▀└╚Ą─¤o╚╦ÖC╣▄Ą└č▓ÖzŽĄĮyĮM│╔ęŖłD 1ĪŻŽĄĮyų„ę¬ė╔¤o╚╦ÖC£y┐žŠWĪó¤o╚╦ÖC▌d║╔║═▄ø╝■ŲĮ┼_ĮM│╔Ż¼¤o╚╦ÖC£y┐žŠW░³└©ÖC▌döĄō■ĮKČ╦ĪóĄž├µöĄō■ĮKČ╦║═╣Ō└wīÆĦŻ¼▄ø╝■ŲĮ┼_░³└©’wąą╣▄└ĒĪóöĄō■╣▄└ĒĪó¤o╚╦ÖC▒O┐žĪółDŽ±╠Ä└ĒĄ╚ĪŻ
1.2 £y┐žū▀└╚įOėŗ
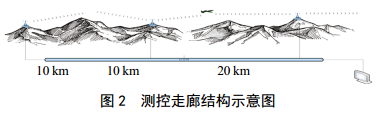
£y┐žū▀└╚ųĖčž╣▄Ą└▓╝įOą╬│╔Ą─¤o╚╦ÖC£y┐žŠWĮjŻ¼ė╔Ąž├µöĄō■ĮKČ╦ĪóĄž├µ┐žųŲšŠĪóÖC▌döĄō■ĮKČ╦║═īÆĦ╣Ō└wĮM║ŽČ°│╔Ż¼╩Ū╣▄Ą└╚½ģ^ķgā╚īŹ¼Fī”¤o╚╦ÖC¤o┐p£y┐ž║═öĄō■é„▌öĄ─ųžę¬▒ŻūCŻ¼╩Ū¤o╚╦ÖC’wąąĄ─¤oŠĆļŖ┐š ųą═©Ą└Ż¼ĮYśŗ╚ńłD 2╦∙╩ŠĪŻ
2 ╝╝ąg╠ž³c
╗∙ė┌£y┐žū▀└╚Ą─¤o╚╦ÖC╣▄Ą└č▓ÖzŽĄĮyŻ¼į┌▒ŻūC¤o╚╦ÖC’wąą║═öĄō■ą┼Žó░▓╚½Ą─Ū░╠ߎ┬Ż¼┐╔īŹ¼F¤o╚╦ÖC▀hŠÓļxū„śIĪółDŽ±īŹĢr╗žé„ĪóīŹĢr╠Ä└Ē║═īŹĢrŅAŠ»[4,5]ĪŻ
2.1 │¼▀hŠÓļxū„śI─▄┴”║═öUš╣─▄┴”
═©▀^£y┐žū▀└╚Ż¼īŹ¼F┴╦¤o╚╦ÖCīŹĢr┐žųŲĪó¤o╚╦ÖCĀŅæBą┼Žó║═╣▄Ą└łDŽ±ą┼ŽóĄ─īŹĢr╗žé„Ż¼▓╔ė├ŠWĮjĮė┴”Īóūįų„ŪąōQĪóŅlūVĖąų¬Ą╚ĘĮĘ©īŹ¼FĖ„╗∙šŠų«ķg│¼▀hŠÓļxĮė┴”║═¤o┐pĖ▓╔w[6]Ż¼ĘŪ│Ż▀m║Ž╣▄Ą└č▓Öz╩╣ė├ĪŻč▓Öz╣▄Ą└ŠÓļxįĮķLŻ¼£y┐žū▀└╚Ą─ā×ä▌įĮ├„’@ĪŻ
2.2 ČÓė├æ¶ū„śI─▄┴”
┐╦Ę■┴╦─┐Ū░č▓Öz¤o╚╦ÖC▓╔ė├Ą─£y┐žµ£┬Ęę╗šŠę╗ÖC─Ż╩ĮŻ¼▓╔ė├H.265łDŽ±ē║┐sś╦£╩Ż¼«öé„▌öĄ─▌d║╔öĄō■×ķ1080 pĖ▀ŪÕłDŽ±ĢrŻ¼£y┐žū▀└╚ę╗éĆ╗∙šŠ┐╔īŹ¼F4╝▄¤o╚╦ÖC═¼Ģr£y┐ž║═öĄō■é„▌öŻ¼░┤ššč▓Öz200 km╣▄Ą└ėŗ╦ŃŻ¼▓╝ų├6Ī½7éĆ╗∙šŠŻ¼└Ēšō╔Ž┐╔ų¦│ų20ČÓ╝▄¤o╚╦ÖC═¼Ģrū„śIĪŻ
2.3 īŹĢré„▌ö║═öĄō■Ę■äš─▄┴”
¤o╚╦ÖC½@╚ĪĄ─╣▄Ą└łDŽ±öĄō■═©▀^£y┐žū▀└╚īŹĢré„▌öĄĮöĄō■ųąą─Ż¼öĄō■ųąą─ī”öĄō■▀MąąīŹĢr╠Ä└ĒĪóīŹĢrĘų╬÷ĪóīŹĢrĖµŠ»║═ą┼ŽóĘų░lŻ¼╩Ūę╗éĆÅŖīŹĢröĄō■é„▌ö║═öĄō■╠Ä└ĒŽĄĮyŻ¼▓╗Ą½─▄ē“ØMūŃ│ŻæB╗»č▓ÖząĶ꬯¼▀Ć─▄ē“į┌╣▄Ą└«É│Ż║═Šo╝▒ŪķørŽ┬×ķøQ▓▀š▀╠ß╣®ųžę¬Ą─öĄō■ų¦ō╬ĪŻ
2.4 öĄō■░▓╚½ąį║═▒Ż├▄ąį║├
öĄō■é„▌öĄ─░▓╚½ąį░³└©Ę┤┐žųŲ║═┐╣Ė╔ö_Č■éĆĘĮ├µŻ¼£y┐žū▀└╚╗∙šŠ▓╔ė├┐╣Ė╔ö_▓©ą╬įOėŗ╝╝ąg║═īŻė├Ą─╝ė├▄šJūC╝╝ągŻ¼▒ŻūC┴╦£y┐žū▀└╚ŽĄĮyĄ─┐╣Ė╔ö_ąį║═░▓╚½ąįĪŻ
2.5 ļŖ┤┼ŁhŠ│╬█╚ŠśOĄ═
£y┐žū▀└╚▓╔ė├Ą═╣”┬╩░l╔õ║═åŠąčįOėŗ╝╝ągŻ¼ļŖ┤┼▌Ś╔õ▀h▀hĄ═ė┌─┐Ū░č▓Öz¤o╚╦ÖCöĄō■µ£▓╔ė├Ą─▀B└m▓©░l╔õĘĮ╩ĮŻ¼ę“┤╦ī”Ąž├µ╚╦åTĪóįO╩®║═’wąą╗Ņäėęį═ŌĄ─Ųõ╦¹ĘĮ├µė░ĒæąĪĪŻ
2.6 ŽĄĮy╝µ╚▌ąį║═ŁhŠ│▀mæ¬─▄┴”ÅŖ
£y┐žū▀└╚įOéõ▓╔ė├═©ė├╗»ļŖÜŌ║═ÖCąĄĮė┐┌▀Mąą▀BĮėŻ¼╗∙ė┌ŠWĮjģfūh▀MąąöĄō■é„▌öŻ¼Š▀ėą▌^ÅŖĄ─╝µ╚▌─▄┴”ĪŻŽĄĮyįOéõ▓╔ė├Ę└ėĻĪóĘ└│▒ĪóĘ└’L╔│║═īÆ£žČ╚įOėŗŻ¼─▄ē“▒ŻūCŽĄĮyį┌▓╗═¼╝Š╣ØĪóÜŌ║“Śl╝■Ž┬įOéõĄ─┐╔┐┐ąį║═ĘĆČ©ąįĪŻ
3 ŽĄĮyæ¬ė├
3.1 ĒŚ─┐▒│Š░
ųąŠÆ╠ņ╚╗ÜŌ╣▄Ą└┘Fų▌Ūń┬Ī╣▄Č╬Ż¼╚ńłD 3╦{╔½Č╬Ū·ŠĆ╦∙╩ŠŻ¼╚½ķL╝s80 kmŻ¼┤®įĮĖ▀ČĖø_£Ž27╠ÄŻ¼Ųõųą┤¾ą═Ė▀ČĖ▀ģŲ┬4╠ÄŻ╗┤®įĮ╣½┬Ę34┤╬Ż¼ŲõųąĄ╚╝ē╣½┬Ę3┤╬Ż╗┤¾ķ_═┌┤®įĮąĪą═║ė┴„2╠ÄŻ©▒▒▒PĮŁĪóą┬š»║ė╝░ų¦┴„Ż®ĪŻ╚½Č╬╬╗ė┌╔Įģ^Ż¼Ąž┘|Śl╝■Å═ļsŻ¼Ąžą╬ČÓ×ķø_£ŽĪóČĖŲ┬Ż¼ŲĘ³┤¾Ż¼╝s10 km╣▄Č╬┤®įĮ╬„├┌║ėČ■╝ē╦«į┤ĄžŻ¼╣▄Ą└螊Ć║Ż░╬į┌605Ī½1760 mų«ķgŻ¼ŽÓī”Ė▀▓Ņ│¼▀^1100 mĪŻ

3.2 ĒŚ─┐īŹ╩®
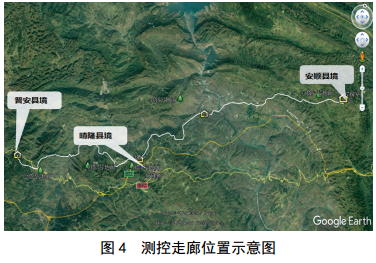
╩ūŽ╚Ż¼į┌įō╣▄Č╬35#ķy╩ęų┴37#ķy╩ęų«ķgŻ¼čž═Š▀xō±5éĆ³cū„×ķ£y┐žū▀└╚╗∙šŠ╬╗ų├Ż¼░▓čbĄž├µöĄō■ĮKČ╦Ż¼═©▀^īŻė├īÆĦĮMŠWŻ¼ĮM│╔£y┐žū▀└╚Ż¼╚ńłD 4╦∙╩ŠĪŻļS║¾▓╔ė├¤o╚╦ÖC╣▄Ą└č▓ÖzŽĄĮyķ_š╣č▓Özū„śIĪŻ
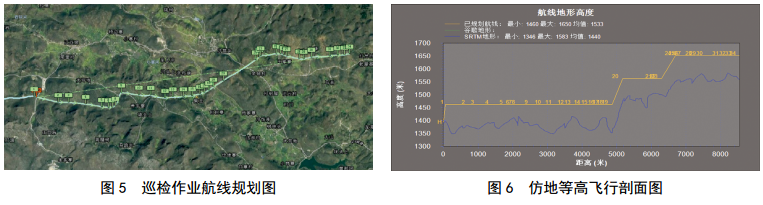
╣▄Ą└ŠĆ┬Ę“ĻččĘų▓╝Ż¼Ė∙ō■īŹĄž┐▒▓ņŅAŽ╚ęÄäؤo╚╦ÖC’wąą║ĮŠĆŻ¼▓╔ė├Ū·ŠĆ║Į³cł╠ąą’wąą╚╬䚯¼║ĮŠĆęÄäØ╚ńłD 5╦∙╩ŠĪŻė╔ė┌č▓ÖzĄžģ^║Ż░╬Ė▀Č╚į┌1350Ī½1600 mĘČć·ā╚ūā╗»Ż¼▓╗═¼║Į³cų«ķg┤µį┌║Ż░╬Ė▀Č╚▓ŅŻ¼╚ńłD 6 Ą─╦{╔½Ąžą╬Ė▀Č╚Ū·ŠĆ╦∙╩ŠĪŻęÄäØ║ĮŠĆĢr║Į³cĖ▀Č╚▀xė├Į^ī”║Ż░╬Ė▀Č╚Ż¼╣▄Ą└║Ż░╬Ą═ätęÄäØ║Į³cĖ▀Č╚ę▓Ą═Ż¼║Ż░╬Ė▀ät║Į³cĖ▀Č╚ę▓Ė▀Ż¼╚ńłD 6╦∙╩Š³S╔½║ĮŠĆĖ▀Č╚Ż¼īŹ¼FĘ┬ĄžĄ╚Ė▀’wąąĪŻ
3.3 £yįćĮY╣¹
ĮøČÓ┤╬’wąą“×ūCŻ¼ėŗ╦ŃĄ├│÷¤o╚╦ÖCč▓ÖzĄ─║Ž└Ē’wąąĖ▀Č╚Ż║į┌Ūń└╩¤o’L╠ņÜŌŻ¼Į©ūhūŅĄ═’wąąĖ▀Č╚×ķ110 mŻ¼į┌┤╦Ė▀Č╚Ž┬Ż¼┐╔ęŖ╣ŌĄ§┼ōī”╠ņ╚╗ÜŌ╣▄Ą└ĖĮĮ³Ą─Ąžą╬Ąž├▓ėąŪÕ╬·╚½├µĄ─Ę┤üŻ¼┐╔ęįŪÕ│■ĄžūRäeŠĆ┬Ęėą¤o┬Ń┬ČŻ¼ĖĮĮ³╩Ūʱėą╩®╣ż╝░▀`═Ż▄ć▌vĄ╚ĪŻ
¤o╚╦ÖCč▓ŠĆęĢŅl═©▀^£y┐žū▀└╚īŹĢré„▌öų┴┘FĻ¢Ęų╣½╦ŠŻ¼īŹ¼F▀h│╠▒O┐žŻ¼└¹ė├öĄō■ųąą─╠Ä└Ē▄ø╝■īŹ¼FīŹĢrĘų╬÷ĖµŠ»Ż¼×ķ╣▄└ĒøQ▓▀╠ß╣®öĄō■ų¦ō╬ĪŻ
4 ĮYšō
īŹĄžįć“×│õĘų“×ūC┴╦╗∙ė┌£y┐žū▀└╚Ą─¤o╚╦ÖCč▓ÖzŽĄĮyį┌ė═ÜŌ╣▄Ą└ŠÓļxķLĪóõüįOĘČć·ÅVŻ¼╦∙╠Äģ^ė“Ąžą╬ĪóĄž├▓Å═ļsŻ¼ÜŌ║“ŁhŠ│ČÓūāŚl╝■Ž┬æ¬ė├Ą─┐╔ąąąįĪóīŹė├ąįŻ¼×ķĮ±║¾╔Įģ^Ą╚Å═ļsĄžą╬Śl╝■Ž┬¤o╚╦ÖCč▓Özū„śI╠ß╣®┴╦┐╔┐┐Ą─╩ŠĘČĪŻ╬┤üĒīóį┌ā╔éĆĘĮ├µīŹ¼F═╗ŲŲĪŻę╗╩ŪČÓ¤o╚╦ÖC╝»╚║Ż¼ųž³c░lš╣¤o╚╦ÖC╝»╚║║═ģf═¼ū„śIĄ╚╝╝ągŻ¼īŹ¼F¤o╚╦ÖCĮyę╗š{Č╚║═ųĖō]Ż¼╠ß╔²č▓Özū„śIĄ─Ģrą¦ąįĪŻČ■╩ŪČÓį┤öĄō■╚┌║ŽŻ¼┐╝æ]└¹ė├¤o╚╦ÖCÆņ▌dČÓĘNÖz£yāxŻ¼īó▓╔╝»öĄō■═©▀^ųŪ─▄╦ŃĘ©▀Mąą╠Ä└ĒŻ¼╠ßĖ▀č▓Özū„śIĄ─£╩┤_ąįĪŻ
ģó┐╝╬─½IŻ║
[1] └ŅŲ„ėŅŻ¼Åłš³ėŅŻ¼┴°Į©▒¾Ż¼Ą╚. ¤o╚╦ÖC▀bĖąį┌ė═ÜŌ╣▄Ą└č▓ÖzųąĄ─æ¬ė├[J]. ╝t═ŌŻ¼ 2014Ż¼ 35(3)Ż║ 37-42.
[2] ╬õ║Ż▒“. ¤o╚╦ÖCŽĄĮyį┌ė═ÜŌ╣▄Ą└č▓ÖzųąĄ─æ¬ė├蹊┐[J].ųąć°╩»ė═║═╗»╣żś╦£╩┼c┘|┴┐Ż¼ 2014Ż¼ 34(9)Ż║105-106.
[3] äó╦╔┴ųŻ¼ųņė└žSŻ¼Åłš▄Ż¼Ą╚. ╗∙ė┌ŠĒĘe╔±ĮøŠWĮjĄ─¤o╚╦ÖCė═ÜŌ╣▄ŠĆč▓Öz▒O▓ņŽĄĮy[J]. ėŗ╦ŃÖCŽĄĮyæ¬ė├Ż¼ 2018Ż¼ 27(12)Ż║ 40-46.
[4] ╬╠╦╔韯¼┘ć╦╣┬öŻ¼ĻÉ║Żą█Ż¼Ą╚. ╗∙ė┌ąĪą═╦─ą²ęĒ¤o╚╦ÖCĄ─Ą└┬ĘĮ╗═©č▓ÖzŽĄĮy[J].ļŖūėįOėŗ╣ż│╠Ż¼2016Ż¼ 24(3)Ż║ 78-81.
[5] ═§æcć°Ż¼═§┼dīÄ.¤o╚╦ÖC╣▄Ą└č▓ÖzŽĄĮyį┌▌öÜŌ╣▄Ą└Ą─æ¬ė├[J]. ├║ÜŌ┼c¤ß┴”Ż¼ 2018Ż¼ 38(12)Ż║ 43-46.
[6] ų▄ņ═.¤o╚╦ÖCĄž├µšŠ░lš╣ŠC╩÷[J].║Į╠ņļŖūė╝╝ągŻ¼2010(01)Ż║ 1-6.

ū„š▀║åĮķŻ║±R╬─Ż¼ 1967─Ļ╔·Ż¼╣ż│╠ĤŻ¼«ģśIė┌ųąć°╚╦├±ĮŌĘ┼▄Ŗ┐š▄Ŗī¦ÅŚīWį║└ū▀_╣ż│╠īŻśIŻ¼¼FÅ─╩┬═©ą┼┼c£y┐žīŻśIĘĮŽ“Ą─蹊┐╣żū„ĪŻ┬ōŽĄĘĮ╩ĮŻ║ 13582199611Ż¼ cetcmw@126.comĪŻ
╔ŽŲ¬Ż║
Ž┬Ų¬Ż║
 Ė╩╣½ŠW░▓éõ 62010202003034╠¢
Ė╩╣½ŠW░▓éõ 62010202003034╠¢ 
